Chaos Slinger
Laatste
wijziging 2023-04-30

Een
gewone enkelvoudige slinger vertoont een zeer regelmatig gedrag, we
gebruiken 'm in veel mechanische klokken voor behoorlijk
nauwkeurige
tijdmeting.
Als je een tweede slinger aan het gewicht van een eerste bevestigt
krijg je
een chaos systeem.
Het gedrag van zo'n systeem is extreem afhankelijk van de begin
conditie en
-aangezien elk moment beschouwd kan worden als de beginconditie voor
wat er
gaat volgen- zal het systeem chaotisch blijven.
Het chaotische gedrag komt voort uit de energie uitwisseling tussen de
hoofdslinger en de nevenslinger, niet uit de een of ander vorm van ruis
of andere toevalsfactor.
Deze slinger wordt elektrisch aangedreven om de wrijvingsverliezen te
compenseren, maar zo dat er geen chaos bevorderd wordt. De hoofdslinger krijgt elke keer als 'ie het
laagste punt passeert een zet in de goede richting. De tweede slinger
heeft
geen eigen aandrijving.
Deze slinger is opgebouwd uit enkele onderdelen van een gesloopte
harddisk, zoals de disk-motor en
het lager van de koppen-arm. En er was wat draai- en freeswerk nodig aan stukken aluminium die ik toevallig had liggen. De kleurtjes zijn aangebracht door anodiseren.
De aandrijving wordt bestuurd door een
Arduino
Nano.
De slingers zijn
niet gevormd door een punt-massa aan een dunne staaf, maar als een
verdeelde massa die ergens nabij, maar beslist niet in het massa
middelpunt gelagerd is. Dat veroorzaakt dat de slingers langzamer gaan
dan een staaf-massa combinatie van vergelijkbare afmetingen zou doen.
Om ze nog langzamer te laten gaan kun je het systeem niet vertikaal maar
onder een hoek achterover hellend plaatsen. Dat heeft het zelfde effect
als het verkleinen van de zwaartekracht.

Uitwendige. Klik voor groter.
Download een korte video van het bewegende ding (2 Mbytes AVI) of een langer fragment (8.5 Mb)
Misschien werkt een Matroska bestand beter: korte video langer fragment
(*) Recent (april 2023) ontstond er een discussie met iemand die overtuigd was dat een slinger als deze zich niet volstrekt chaotisch zou gedragen, maar een repeterend patroon zou vertonen. Ik doe daarom een poging om aan te tonen dat niet het geval is.
Die redenering gaat als volgt:
We kunnen op elk moment, hoe oneindig kort ook, de toestand van het systeem beschrijven met 4 parameters: de hoeken van de twee slingerarmen en de rotatie snelheden die ze hebben. Alle vier deze parameters kunnen binnen een bepaald bereik alle mogelijke waarden hebben als een continuüm. Dat zijn bij benadering oneindig veel mogelijkheden. Voor elke combinatie van deze parameters volgt een (iets) andere toekomst voor het systeem. In die zin is het systeem gedetermineerd.
Echter, de geringste afwijking van 1 of meer van deze waardes zal een vervolg hebben dat in toenmende mater afwijkt van wat er zonder die afwijking zou gebeuren.
Mijn stelling is nu: Het is denkbaar, maar extreem onwaarschijnlijk dat er ooit een keer opnieuw exact een zelfde toestand zal optreden die dan een herhaling van die vorige sequentie zal veroorzaken.
Bovendien zal beweging en turbulentie van de omringende lucht bijdragen aan de onvoorspelbaarheid van het gedrag.
Mail me maar als je het niet eens bent met deze redenering.
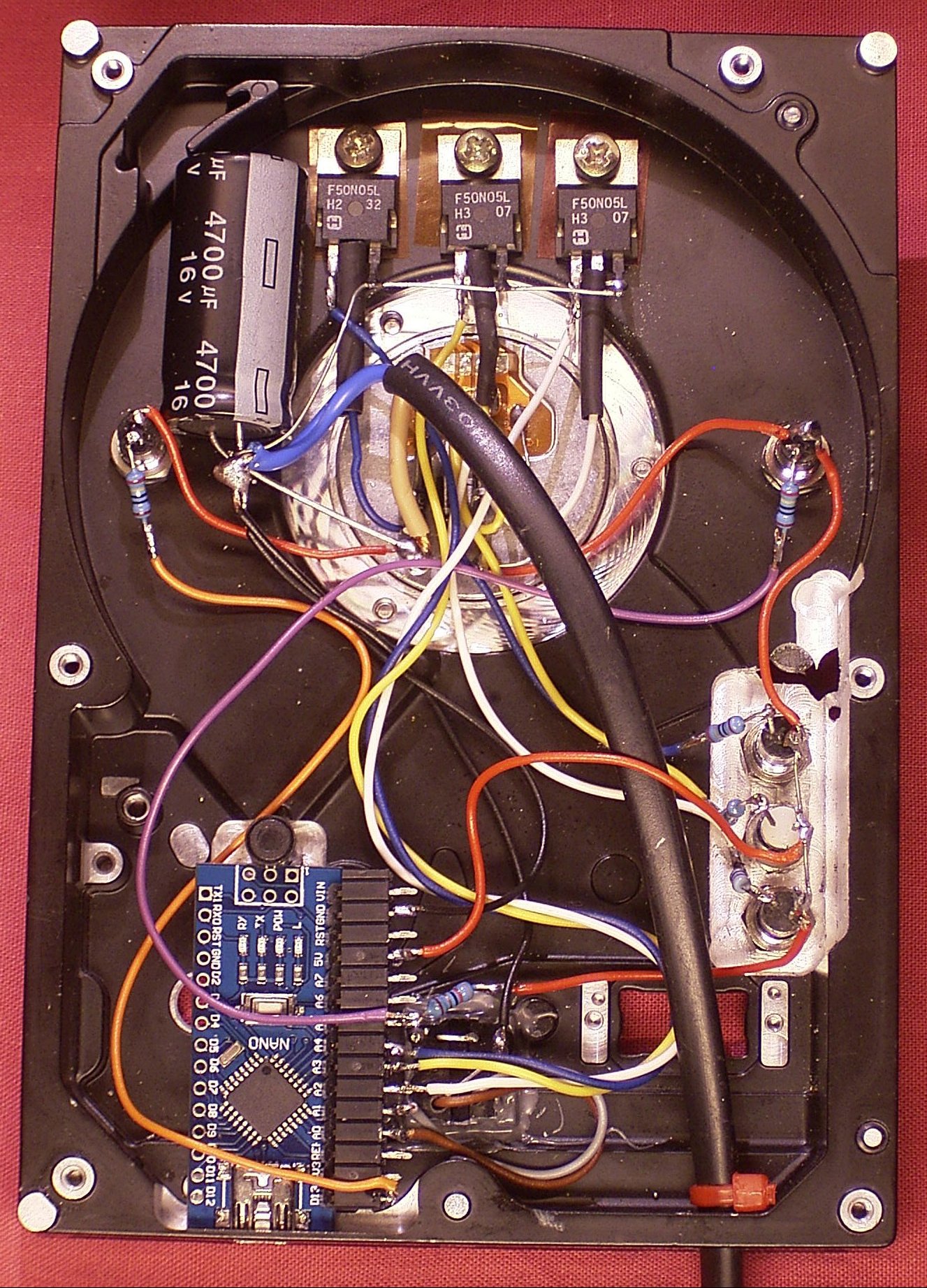
Inwendige. Bovenaan de powerfets boven de motor die omgekeerd gemonteerd is zodat 'ie naar achter uitsteekt, linksonder de Nano, daarnaast de opto-sluisjes, en rechts de 3 leds voor de fasen.
Klik voor groter.
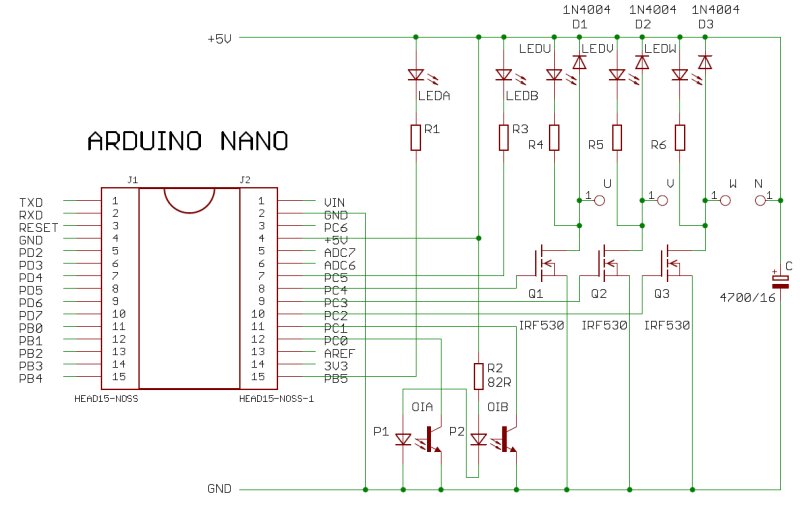
Het elektrische schema. Geen van de componenten is critisch. Kies power FET's met gate-on threshold < 3 Volt.
Weerstanden dienen aangepast te worden voor de gewenste helderheid van de leds. De voeding moet minimaal 2 A kunnen leveren.
De aandrijving gaat als volgt:
Ter weerszijde van het Onderste Dode Punt (ODP) zitten lichtsluisjes A en B waarmee gemeten wordt in welke richting en met welke snelheid de slinger passeert. Na iedere passage wordt de motor geactiveerd in de goede richting gedurende een tijd die afhangt van de gemeten snelheid.
De motor heeft 3 fasen en 4 polen, de mechanische hoek tussen twee opvolgende fasen is dus 30°. De hoek tussen de lichtsluisjes is 5.7 graden.
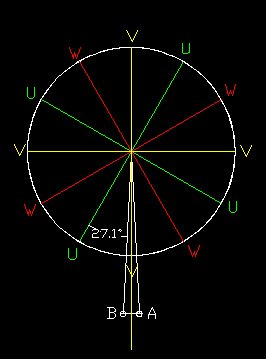
Veronderstel dat het ODP uitgelijnd is met de V-fase als in de tekening. We moeten dan bij een doorgang van links naar rechts de W-fase activeren, maar niet langer dan dat de slinger voorbij het W-punt komt, want dan zou 'ie weer teruggetrokken worden.
Het meten van de snelheid gebeurt door in een 4 kHz tempo de optosluisje te besnuffelen. We vinden dan een aantal counts N gedurende die doorloop van 5.7 graden. We activeren de W-fase op 5.7 / 2 = 2.35°. Even aangenomen dat de slinger met dezelfde snelheid verder gaat (dat is niet zo, daar gaat het juist om) zou de W fase bij 30° afgeschakeld moeten worden. Dat is N * (30 - 2.35) / 5.7 = N * 4.85 counts later. De verwachting/bedoeling is dat de slinger in die tijd wat versnelt, dus moeten we wat eerder afschakelen, een factor 4 blijkt goed te werken. Een heel getal heeft ook het voordeel dat er geen drijvende kommaberekeningen nodig zijn.
Gebleken is dat er hiermee te weinig energie in het systeem komt. Daarom is er een tweede duw gerealiseerd door na het afschakelen van de W-fase de U-fase te activeren, wel wat korter, een factor 3 * N counts blijkt goed te werken.
Bij de overgang in de andere richting gaat alles in de omgekeerde volgorde.
Nu moeten we er voor zorgen dat de slingers niet teveel energie opzamelen. Het teken daarvoor is als de hoofdslinger meerdere malen achter elkaar "over de kop" gaat. We detecteren dit door overgangen AB en BA te tellen, iedere keer als we meer dan X overgangen AB c.q. BA achter elkaar gezien hebben wordt het bekrachtigen van de motor overgeslagen. Als we dan weer een overgang in de andere richting gezien hebben wordt die teller weer op nul gezet. X = 4 blijkt te voldoen.
We moeten ook zorgen dat het systeem op gang komt, ongeacht waar de slinger stil staat (*). De firmware kan onderscheid maken tussen 3 plaatsen: op de A sluis, op de B sluis of ergens anders. Voor al deze situaties wordt er getest of die positie niet te lang (ca. 8 seconden) aangehouden wordt. Zoja dan wordt 1 van de motor fasen even aangestuurd. Nu zou het kunnen gebeuren dat de slinger net in lijn staat met die fase, waardoor er niets gebeurt. Dat wordt ondervangen door bij een volgende poging een andere motor-fase te activeren.
Tijdens de ontwikkeling is er seriële communicatie gebruikt voor diagnostiek. Toen alles goed werkte is dat veranderd in output waarmee het chaotische gedrag gelogd kan worden zodat het bestudeerd kan worden. Bij elke passage worden de snelheid (met teken) en de tijd sinds de vorige passage uitgestuurd. Logging levert een kommagescheiden bestand op dat verder verwerkt kan worden.
(*) Ook tijdens de normale chaotische beweging kan de slinger tot stilstand komen in het bovenste dode punt. Ondanks dat dat een labiel evenwicht is kan 'ie er blijven staan, omdat er een beetje stilstaande wrijving in de lagers zit.
Hier kun je de Arduino code downloaden.